|
|
| О компании | Продукция | Склад | Документация | Расчеты | Ссылки | Вакансии | Контакты |
Библиотека  Вся докуменация, более 10 гигабайт, доступна в нашей библиотеке. |
Системы управления линейным движением с передаточными устройствами.Рассмотрим разнообразные варианты управляемого линейного движения. Будем разделять линейное движения, полученное за счет двигателя вращательного движения и той или иной передачи, и линейное движение, реализованное за счет непосредственного линейного привода. В первом случае качество движения будет определяться как характеристиками самого двигателя и его системы управления, так и характеристиками передающего устройства. Существует великое множество устройств, реализующих преобразование вращения в линейное движение. Среди них:
Первые две предназначены для реализации транспортных задач линейного перемещения невысокой точности. Это, например, разнообразные транспортеры в пищевой и добывающей промышленности, разнообразные подъемные устройства (лифты, краны) и т.д. Главным преимуществом этих передач является их низкая стоимость по сравнению со всеми остальными и отсутствие значительного момента инерции (или массы). Но основной их недостаток - их низкая жесткость. Поэтому говорить о точности в сочетании с высокой динамикой не приходится. На двух последних пунктах остановимся подробнее. Эти два типа передачи используются очень активно для организации автоматической обработки деталей и точного позиционирования. Причем, для каждого типа находится свое оптимальное применение. Хотя и рейка-шестерня, и винт-гайка могут быть исполнены в различных классах точности, то есть имеется ввиду тоже транспортное применение, но основное применение именно для задач точности порядка 0,1 мм и выше (как уже было сказано, задачи автоматической обработки и точного позиционирования). Принцип действияпередачи зубчатая рейка-шестерняпредельно прост: при вращении шестерни ее зубцы зацепляются за зубцы реки и вращающий момент на валу шестерни передается через зацепление рейке, которая в свою очередь приводится в движение. Передача типа рейка-шестерня может быть исполнена в различных классах точности вплоть до 6 класса - менее 0,02 мм накопленной погрешности на 1 м. Максимально-возможное усилие в линейном направлении измеряется 100 кН [1]. Подбирая соответствующие значения модуля зацепления и числа зубъев шестерни, можно добиваться различных значении коэффициента передачи, а соответственно и различных линейных скоростей перемещения. Имеются также возможности соединения нескольких однотипных реек в непрерывную цепь для реализации необходимой длины. Вообще говоря, с помощью этой передачи можно решать разнообразные координатные задачи перемещения в пространстве. К недостаткам такого типа передач можно отнести не всегда удобное традиционное размещение привода на движущейся части и сложная реализуемость центровки (при осуществлении управления движением стола, подающего заготовку). Из-за этого применение такого типа передач ограничено в обрабатывающих центрах (фрезерных и шлифовальных станках). Поэтому наибольшее применение они находят в многокоординатных роботах, портальных кранах (транспортные системы). Тем не менее, высокое качество изготовления, невысокий момент инерции и практически неограниченная длина перемещения дают возможность применять системы с такими передачами в устройствах с высокой точностью. Но при предъявлении значительных требований по точности изготовления рейки соответствующим образом возрастает и цена. К тому же люфты в передачах такого типа, в принципе, полностью выбрать невозможно. Принцип действияпередач типа винт-гайка настолько же прост, как и у предыдущей передачи. Передача энергии вращательного движения в энергию движения линейного может происходить двумя способами: вращением винта и вращением гайки. В первом случае (наиболее распространенном) винт фиксируется в подшипниковых опорах, а гайка закрепляется за передвигаемую каретку, установленную на линейных направляющих. Тогда, вращая винт, наблюдаем линейное перемещение, скорость которого пропорциональна скорости вращения приводящего двигателя . Второй способ предполагает жесткое закрепление винта. В этом случае двигатель, скрепленный с гайкой, должен иметь полый ротор. И в том и в другом случае коэффициент передачи будет пропорционален шагу винта. Прародителем точных передач такого типа был шлифованный трапециидальный винт с гайкой. С их помощью до появления шариковых и роликовых передач создавались высокоточные обрабатывающие станки. Но очевидны его недостатки: высокое сопротивление перемещению (трение скольжения), высокие затраты на обслуживание (нужно постоянно смазывать), а в связи с этим и непродолжительное время жизни. Вполне естественным может показаться желание уйти от трения скольжения и заменить его трением качения. Именно такое желание в итоге и привело к появлению шарико-винтовых (ШВП) и ролико-винтовых передач. Более подробно рассмотрим только первые. На рисунке представлена ШВП в разрезе с системой возврата шариков по канавке через всю гайку. 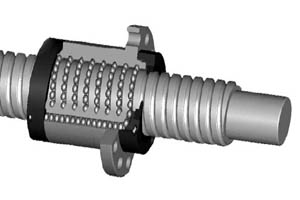
Существенным отличием ШВП от передачи типа рейка-шестерня является возможность полного избавления от люфтов путем предварительного натяжения гайки при установке на винт. Кроме того, существуют такие винты, точность изготовления которых соответствует 5 классу, что составляет порядка 0,01 мм накопленной погрешности на 1 м. Нагрузочная способность ШВП лежит в диапазоне от 5 до 150 кН [2]. Благодаря этим особенностям мы получаем исключительную плавность хода в сочетании со значительными нагрузками и высокой точностью. В настоящее время ШВП совместно с двигателями вращательного движения используются в подавляющем большинстве обрабатывающих станков для осуществления прямолинейного перемещения. Но как "механическое упругое звено" в контуре управления перемещением любая передача (рейка-шестерня и ШВП, в частности) накладывает свои ограничения. Существуют ограничения на скорость (для ШВП существует такое понятие, как критическая гармоническая скорость, которая связана с упругими свойствами винта и гайки и приводит как к потере управляемости, так и к выходу из строя передачи) и ускорение (в силу ограниченной прочности и наличия собственного момента инерции). Эти и другие особенности электропривода с механическим передаточным устройством заставили разработчиков обратить свои усилия на разработку непосредственного электропривода как вращательного, так и линейного движения. |
Продукция
|
|
Дата :10.03.2026
Mozilla/5.0 AppleWebKit/537.36 (KHTML, like Gecko; compatible; ClaudeBot/1.0; +claudebot@anthropic.com) 216.73.216.215 |
|


















